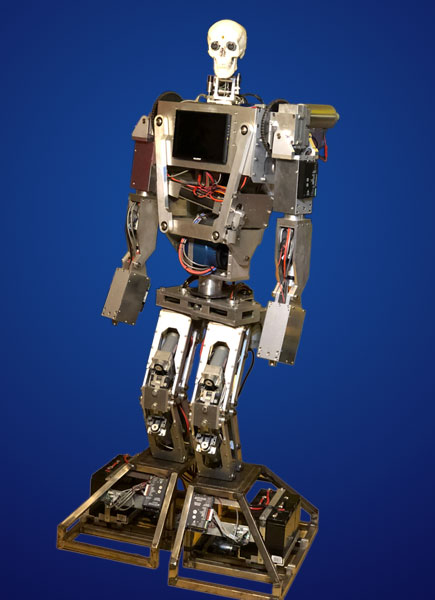
 I started to build this robot to compete in Robot Wars. The big heavy feet were intended to keep from being knocked over by it's competitors. The project was abandoned for years but I did finally bring it to an operating state. There are many things to improve and complete, but the 24 major axes installed so far are all running.
I started to build this robot to compete in Robot Wars. The big heavy feet were intended to keep from being knocked over by it's competitors. The project was abandoned for years but I did finally bring it to an operating state. There are many things to improve and complete, but the 24 major axes installed so far are all running.
The motors are brushed DC and all controlled via 2-axis controllers I designed which either drive a low current h-bridge of my design for small motors or a higher current commercial drive. The controllers are all networked together over a single CAN bus connected to the i7 main board in the chest.
I added some motors to a benchtop mill and wrote a program to make a mini CNC mill which I used along with my benchtop lathe to machine most everything. A few parts I made on some bigger machines at work.
The main processor is running Windows and communicates over wifi to a remote controlling PC laptop running the same program as the robot but configured as the remote. The robot has a router mounted on its back to provide the wifi (no internet). The head has 3 axes of motion and two USB cameras that provide stereoscopic video over wifi to the remote computer which are displayed on the operator's 3D HMD. It currently uses some Microsoft webcams and a Vuzix HMD with a smallish FOV and not the best tracking, but I have a new camera and an Oculus Rift upgrade working off the robot and waiting to be installed.
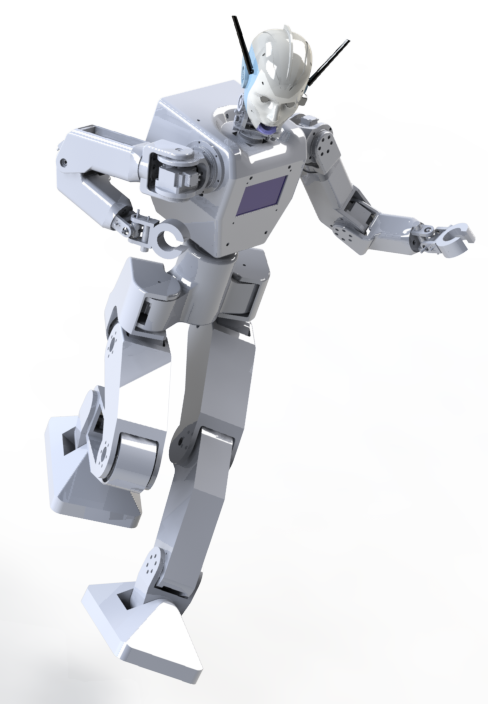
The design is all modeled in Solidworks and the software imports the converted model files to build a model for DirectX. The GUI can render the model on the robot's display to allow the user to pick axes and jog them individually and define control points for complex coordinated moves that are formed by building a spline through each control pose. The remote controlling computer can render the model or other 3D content on top of the incoming video stream for a remote AR. The POV can be attached to the camera in the robot's head or moved around to any desired view location. The software is writen in C++ with Visual Studio for Windows but I have tried to leave the ability to port to Linux. The GUI code is separated from the functional code and well modularized. My goal was to create a full exoskeleton to teleoperate the robot with a level of force feedback and audio video streaming in real time.
Here is a link to a video showing the head tracking of the robot.

I would like to take the basic concepts in a more professional direction by designing a service robot with force feedback remote control which will be a tool for training autonomy with the advancing technologies in machine learning and AI.
Here is a very simplified mockup of the concept:
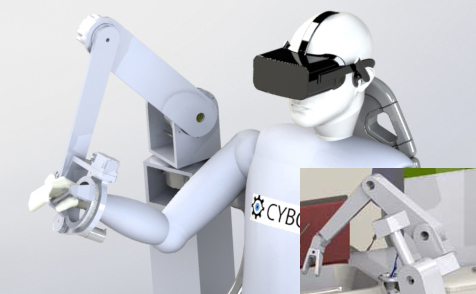
The idea is that the operator sits in a chair and drives the robot around and controls the elevation of the robot’s chest (neck base and shoulder base) with a joystick or two in the left hand while controlling the arm of the robot with force feedback to the operator’s right hand. The robot head tracks the HMD. The idea is to start very simple with a reduced DOF hand and single arm to see if we can tackle some basic pick up and cleaning tasks at increasing levels of autonomy.
I am working on putting together a new robot using a 3D printer
Neck coming together...
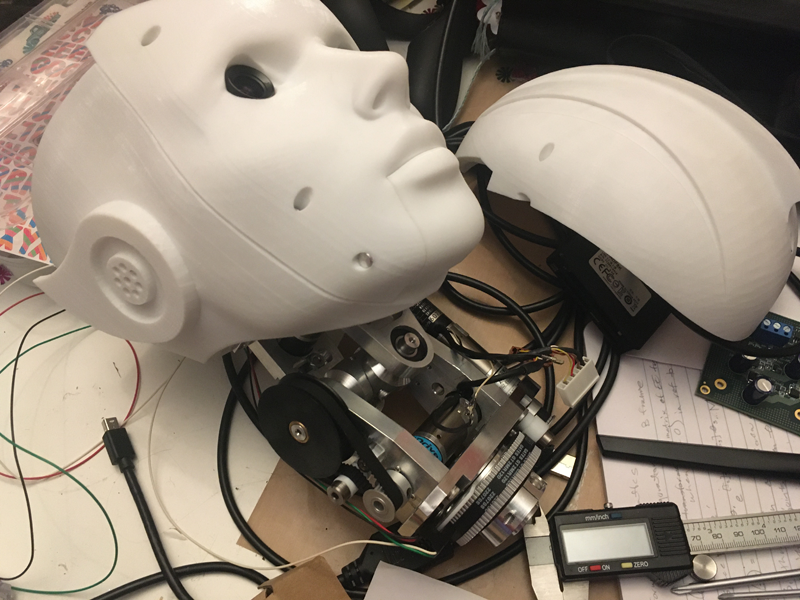
Jetson Nano mounted in head...

